Vima Review
· 2 min read

VIMA
- Unified Multimodal Prompts: Reformulates diverse robot tasks (language, images, video) into a single sequence modeling problem.
- Object-Centric Tokenization: Uses object-level tokens (Mask R-CNN + ViT) instead of raw pixels, improving data efficiency and semantic generalization.
- Cross-Attention Conditioning: Conditions the policy on prompts via cross-attention, maintaining strong zero-shot performance even with small models or novel tasks.
Motivation
- Robot task specification comes in many forms: one-shot demonstrations, language instructions, and visual goals.
- Traditionally, each task required distinct architectures and pipelines, leading to siloed systems with poor generalization.
Key Contributions
-
Multimodal Prompting
- A novel formulation that unifies diverse robot manipulation tasks into a sequence modeling problem.
- Prompts are defined as interleaved sequences of text and images, enabling flexibility across task formats.
-
VIMA-BENCH
- A large-scale benchmark with 17 tasks across six categories (object manipulation, goal reaching, novel concept grounding, video imitation, constraint satisfaction, visual reasoning).
- Provides 650K expert trajectories and a four-level evaluation protocol for systematic generalization.
-
VIMA Agent
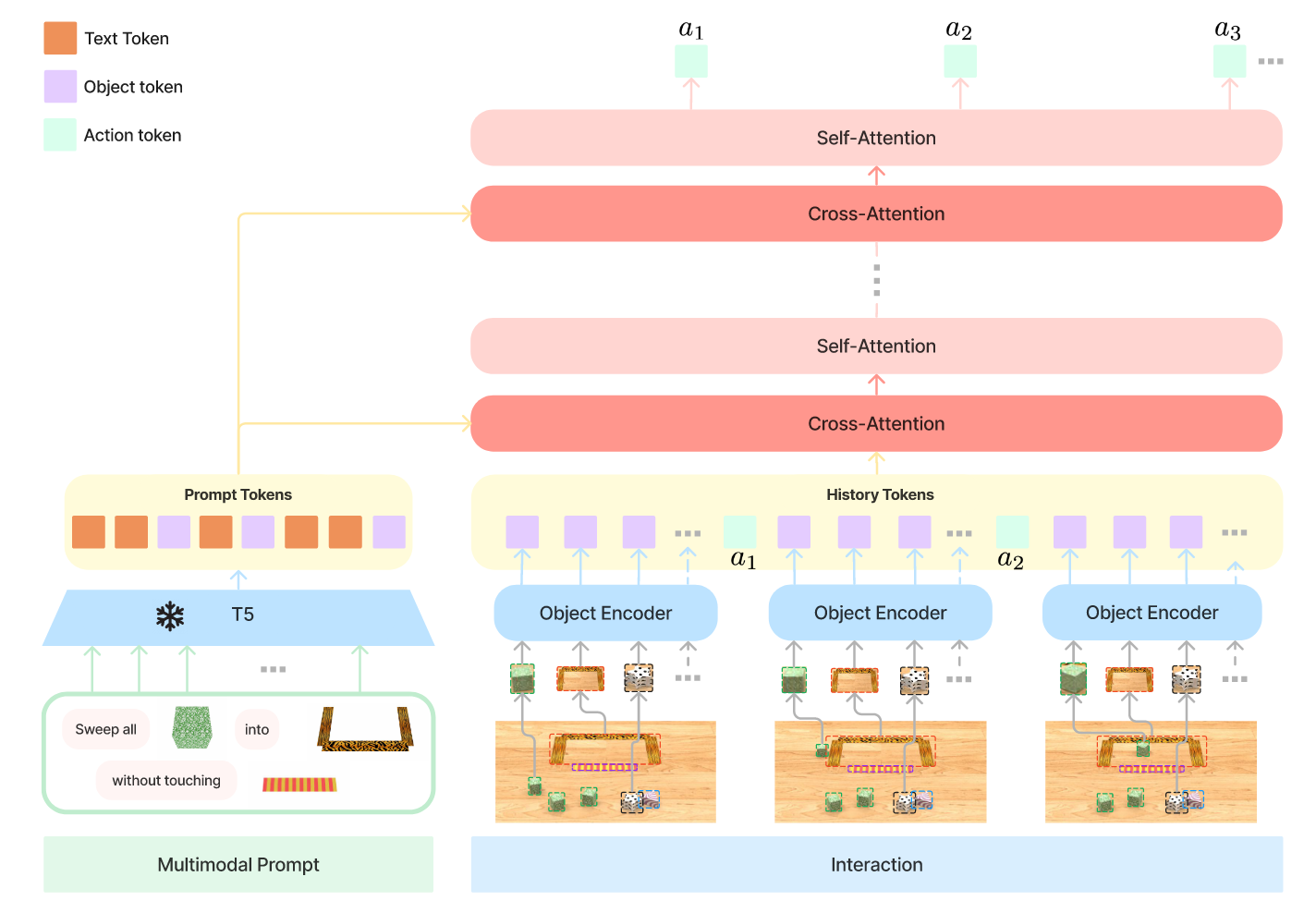
- A transformer-based visuomotor agent with encoder-decoder architecture and object-centric design.
- Encodes prompts with a pre-trained T5 model, parses images into object tokens via Mask R-CNN + ViT, and decodes actions autoregressively using cross-attention.
Design Insights
- Object-Centric Representation: Passing variable-length object token sequences directly to the controller is more effective than pixel-based tokenization.
- Cross-Attention Conditioning: Stronger prompt focus and efficiency compared to simple concatenation (e.g., GPT-style).
- Robustness: Minimal degradation under distractors or corrupted prompts, aided by T5 backbone and object augmentation.
Results
-
Performance:
- Outperforms baselines (VIMA-Gato, VIMA-Flamingo, VIMA-GPT) by up to 2.9× success rate in hardest zero-shot generalization.
- With 10× less training data, still 2.7× better than best competitor.
-
Scaling:
- Sample-efficient: with just 1% of data, matches baselines trained with 10× more.
- Generalization holds across L1–L4 evaluation, with smaller regression than alternatives.
Conclusion
VIMA demonstrates that multimodal prompting is a powerful unifying framework for robot learning.
It achieves strong scalability, data efficiency, and generalization, establishing a solid starting point for future generalist robot agents.
Ref
- Jiang, Y., Gupta, A., Zhang, Z., Wang, G., Dou, Y., Chen, Y., Fei-Fei, L., Anandkumar, A., Zhu, Y., & Fan, L. (2023). VIMA: Robot Manipulation with Multimodal Prompts Proceedings of the 40th International Conference on Machine Learning, Proceedings of Machine Learning Research.
https://proceedings.mlr.press/v202/jiang23b.html