RT-2, Robotic Transformer 2 Review
· 4 min read

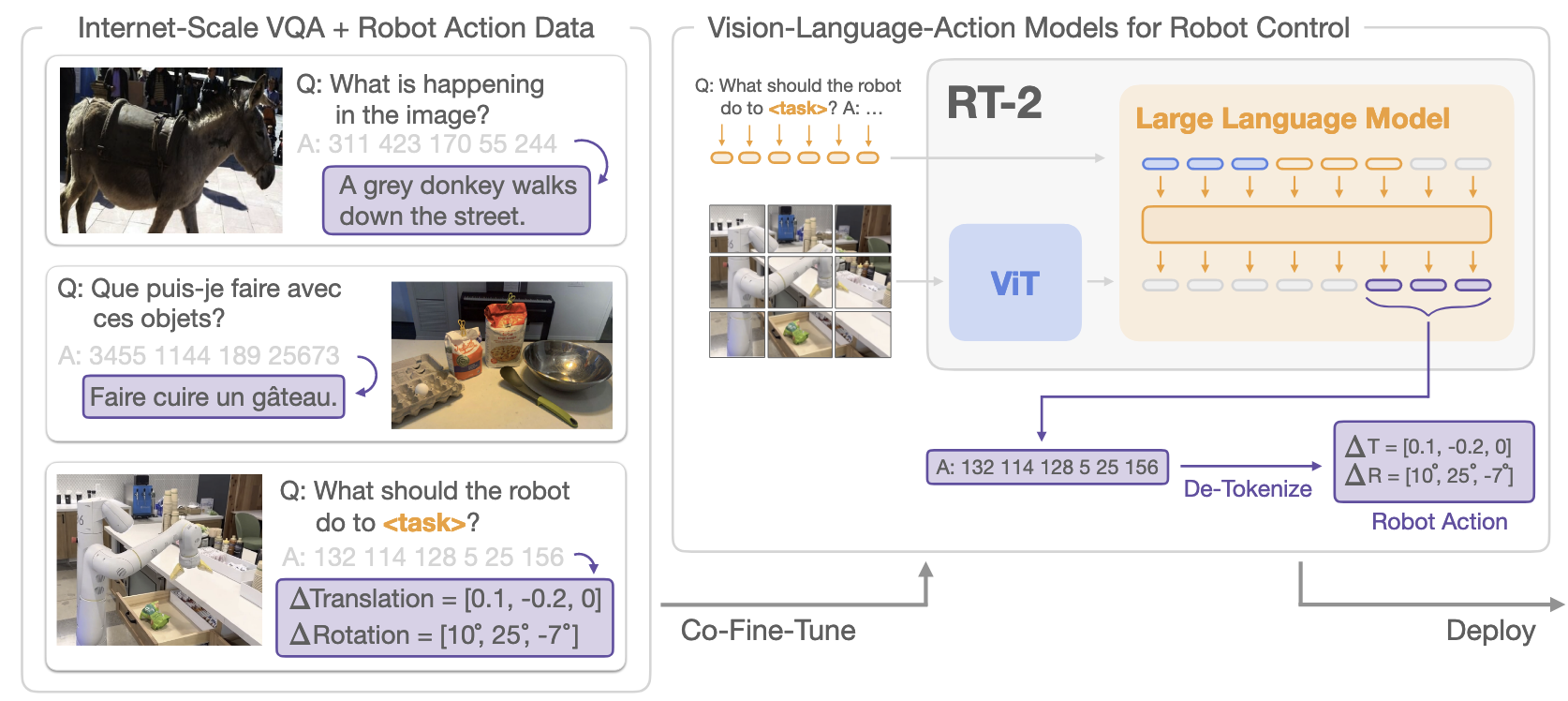
- Trains a Vision-Language-Action (VLA) model by co-fine-tuning web-scale VLMs with robot trajectories, and treats robot actions as text tokens.
- Yields strong generalization and emergent capabilities (symbol understanding, reasoning, human recognition) beyond what appears in robot data.
- Runs in direct closed-loop control; largest evaluated model (55B) executes at ~1–3 Hz via a cloud (multi-TPU) inference setup.
What RT-2 Is
- A family of VLA models (RT-2-PaLI-X, RT-2-PaLM-E) that fine-tune large VLMs on robot trajectories to output low-level actions.
- Target: generalizable, semantically aware manipulation policies that map images + instructions → actions end-to-end.
- RT-2 does not rely on a restricted 2D action space or calibrated cameras.
- The unified output space lets language and action tokens share the same model weights, without action-only layers.
Core Recipe
- Directly train open-vocabulary VQA/dialogue VLMs to output robot actions while they still solve standard vision-language tasks.
- Build on RT-1 protocol/data, but replace the policy backbone with a large VLM.
Action as Language (Tokenization)
- Discretize continuous action dims (Δpos/Δrot, gripper, terminate) into 256 bins; represent each dimension with an integer token.
- PaLI-X: reuse numeric tokens (
≤1000). PaLM-E: overwrite 256 least-frequent tokens as action vocabulary (symbol tuning). - Form a single output string per step (e.g.,
terminate Δposx Δposy Δposz Δrotx Δroty Δrotz gripper).
Co-Fine-Tuning & Output Constraint
- Mix robot data with original web VQA/caption data in training batches (up-weight robot samples) to prevent forgetting and improve generalization.
- During decoding on robot tasks, restrict sampling to valid action tokens so outputs are always executable.
Closed-Loop Control & Real-Time Inference
- RT-2 is trained and deployed for direct closed-loop control (camera → action → camera …), not just high-level planning.
- For large models, inference runs via a multi-TPU cloud service; RT-2-PaLI-X-55B reaches ~1–3 Hz; smaller models ~5 Hz.
Generalization & Benchmarks
- Matches RT-1 on seen tasks but far exceeds baselines on unseen objects/backgrounds/environments (~2× vs RT-1/MOO; up to ~6× vs others).
- Open-source Language-Table sim: co-fine-tuned PaLI-3B outperforms baselines, showing the approach transfers to other robots/sims.
Emergent Capabilities
- Symbol understanding (e.g., “move apple to 3 / heart / star”).
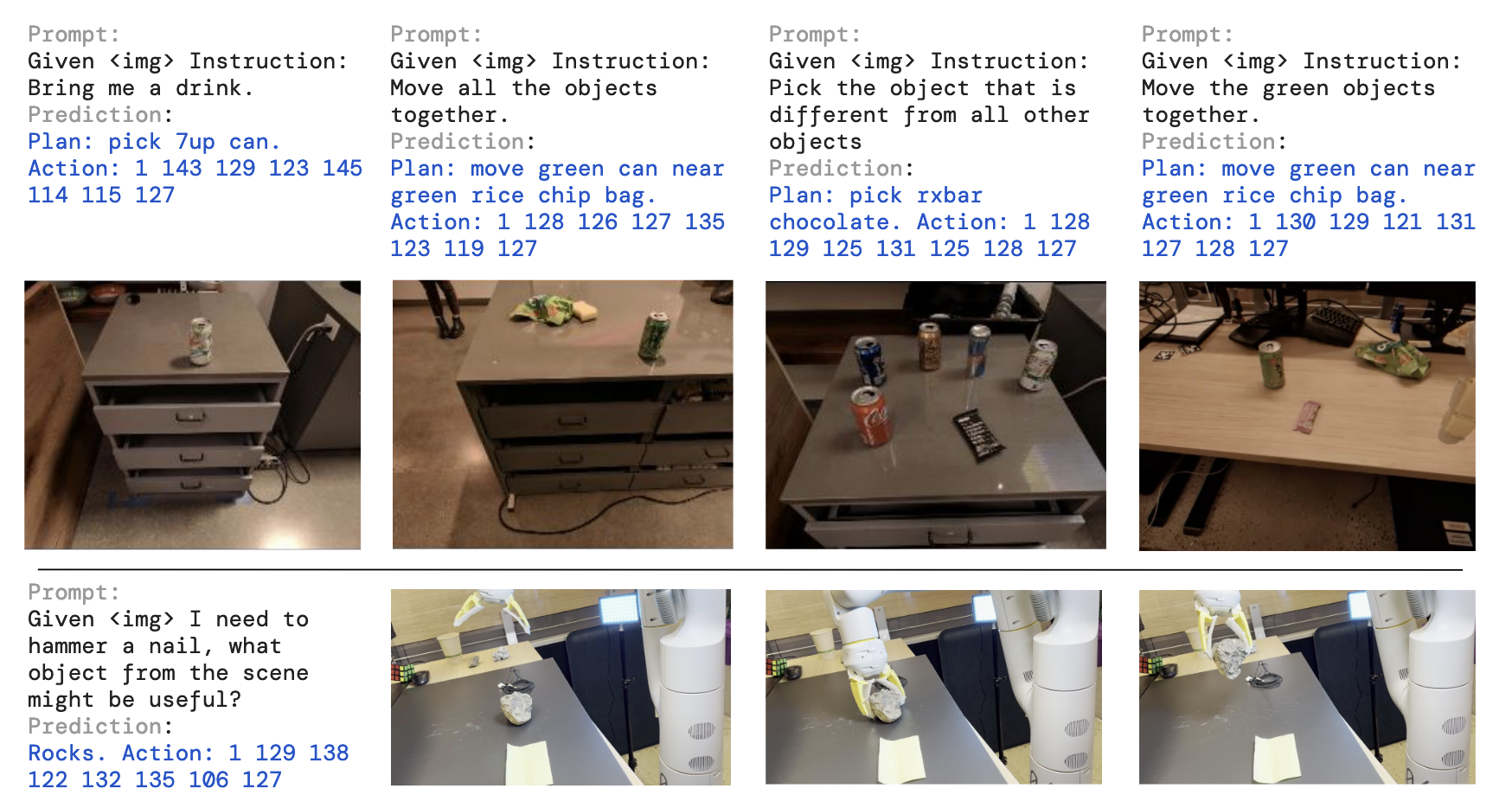
- Reasoning (visual matching, simple math like “sum of two plus one”, multilingual commands).
- Human recognition (e.g., “person with glasses”); none of these were present as low-level actions in robot data.
- Chain-of-thought (CoT) variant adds a Plan step before actions → supports multi-stage semantic reasoning (e.g., pick a rock as an improvised hammer; pick an energy drink for a tired person).
Scaling & Ablations
- From-scratch training (even 5B) performs poorly; fine-tuning helps; co-fine-tuning helps most.
- Bigger models (
55B > 5B) generalize better. - PaLM-E variant shows an edge on math reasoning; PaLI-X stronger on symbols/vision reasoning on average.
Limitations
- Does not learn fundamentally new motor skills beyond the distribution in robot data; mainly transfers semantic/visual knowledge.
- Compute/latency costly; real-time control can bottleneck. Limited availability of strong open VLMs and convenient FT APIs.
Future Directions (from the text)
- Acquire new skills from human videos or richer datasets.
- Quantization/distillation for faster/cheaper inference.
- More open VLMs / FT APIs to make VLA models broadly buildable.
Ref
- Zitkovich, B., Yu, T., Xu, S., Xu, P., Xiao, T., Xia, F., Wu, J., Wohlhart, P., Welker, S., Wahid, A., Vuong, Q., Vanhoucke, V., Tran, H., Soricut, R., Singh, A., Singh, J., Sermanet, P., Sanketi, P. R., Salazar, G., Ryoo, M. S., Reymann, K., Rao, K., Pertsch, K., Mordatch, I., Michalewski, H., Lu, Y., Levine, S., Lee, L., Lee, T.-W. E., Leal, I., Kuang, Y., Kalashnikov, D., Julian, R., Joshi, N. J., Irpan, A., Ichter, B., Hsu, J., Herzog, A., Hausman, K., Gopalakrishnan, K., Fu, C., Florence, P., Finn, C., Dubey, K. A., Driess, D., Ding, T., Choromanski, K. M., Chen, X., Chebotar, Y., Carbajal, J., Brown, N., Brohan, A., Arenas, M. G., & Han, K. (2023). RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control Proceedings of The 7th Conference on Robot Learning, Proceedings of Machine Learning Research.
https://proceedings.mlr.press/v229/zitkovich23a.html