PaLM-E An Embodied Multimodal Language Model Review
· 4 min read

PaLM-E
- ViT (e.g., ViT-4B, ViT-22B) extracts image embeddings.
- OSRT builds object-centric slot representations.
- These are injected into the LLM embedding space (PaLM variants: 8B, 62B, 540B) for high-level abstraction and planning, with execution delegated to low-level policies (e.g., RT-1).
Core idea
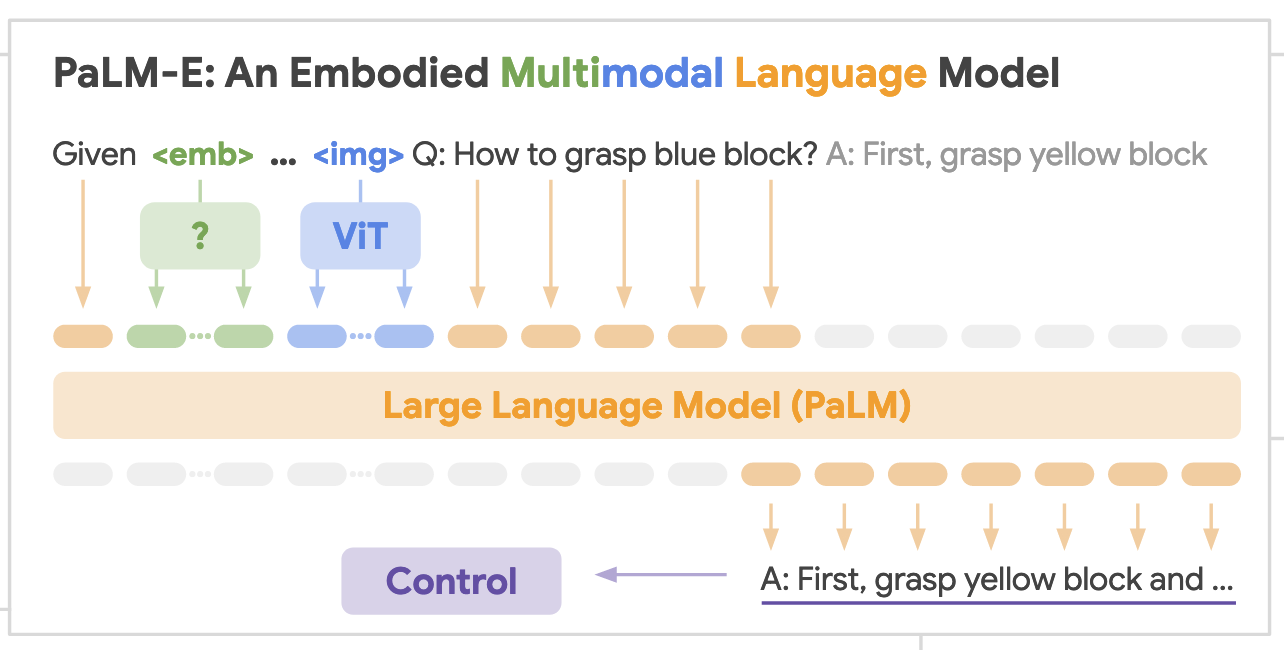
- Build embodied language models by injecting continuous sensor inputs (images, states, other modalities) directly into a pretrained LLM’s embedding space, linking words ↔ percepts.
- Inputs are multimodal sentences that interleave text tokens with encoded visual/state tokens; outputs are text (answers or high-level plans).
Architecture & representations
- Start from a decoder-only, autoregressive LLM (PaLM) and condition on a prefix that mixes text and encoder-produced vectors.
- Provide multiple encoder options:
- State vectors (simplest).
- ViT features with a learned projector ψ to match LLM embedding dimensionality.
- Object-centric, 3D-aware OSRT (neural scene representations). Supports entity-label tokens (
<obj j>) so the model can refer to specific objects in generated plans.
Training setup
- Train end-to-end (encoders + projector + optionally the LLM) to output sequential decisions as natural text or answers (VQA, captioning).
- Dataset items contain (continuous observations, text sequence, prefix index); loss is cross-entropy on non-prefix tokens.
- Explore freezing the LLM (train encoders/projection only), and co-training across diverse tasks ("full mixture"; only ~9% is embodied data).
Planning & control loop
- For planning/control, PaLM-E emits textual subgoals/skills drawn from a small skill vocabulary; a separate low-level policy executes them.
- The system runs closed-loop: execute → observe → (re)plan; PaLM-E acts as a high-level policy sequencing low-level skills.
Why not text-only LLMs or affordance-only grounding?
- Prior work that feeds only text to the LLM (and uses external affordance models) is insufficient when spatial layout matters.
- PaLM-E instead grounds inside the LLM by injecting continuous observations, enabling direct plan generation while leveraging the LLM’s world knowledge.
Environments & use cases
- Three domains: TAMP (grasp/stack planning), Language-Table (multi-object tabletop pushing), Mobile manipulation (kitchen tasks).
- Use cases to test embodied reasoning: affordance prediction, failure detection, long-horizon planning (low-level policies from RT-1).
Results (high level)
- Transfer via co-training: One model trained on mixed tasks/embodiments achieves higher performance than task-specialists; "full mixture" yields
>2×gains (Fig. 3). - Few-shot/data efficiency: Solves robotics tasks with very few examples (e.g., 10–80 for Language-Table, 320 for TAMP). OSRT further improves data efficiency.
- Mobile manipulation: End-to-end embodied planning works in real kitchens, robust to disturbances; PaLM-E beats PaLI (zero-shot) and QT-OPT/CLIP baselines on affordance/failure detection.
- General V+L: The 562B generalist achieves state-of-the-art on OK-VQA and strong VQAv2/COCO without task-specific finetuning.
- Language retention & scaling: Freezing LLM preserves language ability but can struggle on some robotics tasks; unfrozen + scale up significantly reduces catastrophic forgetting.
- Emergent behaviors: Multimodal chain-of-thought and multi-image reasoning emerge in PaLM-E-562B, despite training on single-image prompts.
Takeaways
- Injecting neural scene representations (OSRT) and entity-labeled multimodal tokens is effective even without massive embodied data.
- Diverse, joint training transfers vision-language knowledge into embodied decision-making, enabling data-efficient robot planning.
- Two viable paths to retain language skills during multimodal finetuning:
- Freeze the LLM, train encoders (max language retention, sometimes weaker robotics),
- Unfreeze and scale the LLM (much less forgetting, strong embodied performance).
Ref
- Driess, D., Xia, F., Sajjadi, M. S. M., Lynch, C., Chowdhery, A., Ichter, B., Wahid, A., Tompson, J., Vuong, Q., Yu, T., Huang, W., Chebotar, Y., Sermanet, P., Duckworth, D., Levine, S., Vanhoucke, V., Hausman, K., Toussaint, M., Greff, K., Zeng, A., Mordatch, I., & Florence, P. (2023). PaLM-E: An Embodied Multimodal Language Model Proceedings of the 40th International Conference on Machine Learning, Proceedings of Machine Learning Research.
https://proceedings.mlr.press/v202/driess23a.html