CNN 010
· 약 5분

Drawbacks of Anchor-based detectors
It is sensitive to:
- Size
- Aspect Ratio
- Number of Anchor boxes (Fixed)
- To much variation with shape
- Small object
- May not generalize due to pre-defined anchor boxes
- Computation expensive
Anchor-free detectors
- Localize objects without using boxes as proposals
- Key-point based
- Center-based
Key-point based
- Locates key object parts in an image
- Detects spatial locations or points unique to an object
- With human body as an example
- Key part of face: nose, eyes, eyebrows, mouth ...
- Key point of human body: joints, elbows, knees ...
- Object is represented using Key-points
Center-based
- Finds positives in the center
- Predicts four distances from the positive to the potential object boundary
- Top, left, bottom, right
{x, y, T, R, B, L}
YOLO
- Yolo V1: 2015
- darknet backbone
- Yolo V2: 2016
- Anchor boxes
- Batch normalization
- Yolo V3: 2018
- Objectness score
- improvement for small objects
- Yolo V4/V5: 2020
- Solid Baseline Model
- Lightweight and Fast
- image classification, object detection, and instance segmentation
- Multiple input processing (Video, Image, Live stream)
- Optimize weights
- Developed by Ultralytics (not original author)
- Yolo X/R: 2021
- Decoupled head
- First version of Anchor free
- Improvement efficiency in backbone
- Yolo V6/V7: 2022
- Faster and more accurate
- Yolo NAS/V8: 2023
- Anchor free
- Architectural improvement
- Strong baseline for realtime object detection
- Yolo V9/V10/V11: 2024
- Oriented bounding box
- Strong baseline for oriented object detection
- Yolo V12: 2025
- Attention mechanism, introduced transformer
- Little slower
- Yolo 26: 2026
- Deployment on a small form factor hardware
- realtime object detection on edge devices
- Strongest baseline for edge device deployment (realtime and accuracy)
- Efficient Loss Function
YoloX X
- Anchor-free detector in the Yolo Family
- Decoupled head used
- Label assignment using SimOTA
- Use YoloV3 SPP with DarkNet53 backbone
- Uses advanced augmentation such as Mix-up & Mosaic
- Backbone: Feature extraction
- Neck: Aggregation of multi-scale feature
- Head: Localization and Classification scores
Decoupled head
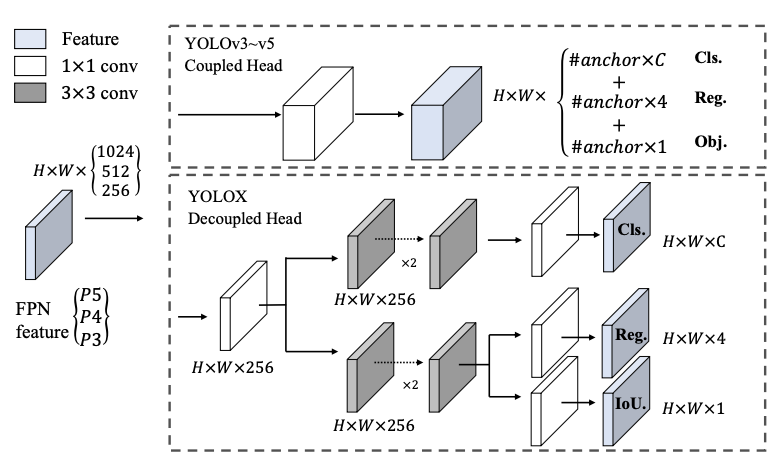
- Coupled Head: one head gives regression score and classification score (Dog/Cat + Location, BBox)
- Decoupled Head:
- First head gives Classification score (Dog/Cat)
- Another head gives Regression score (Location, BBox)
Data Augmentation
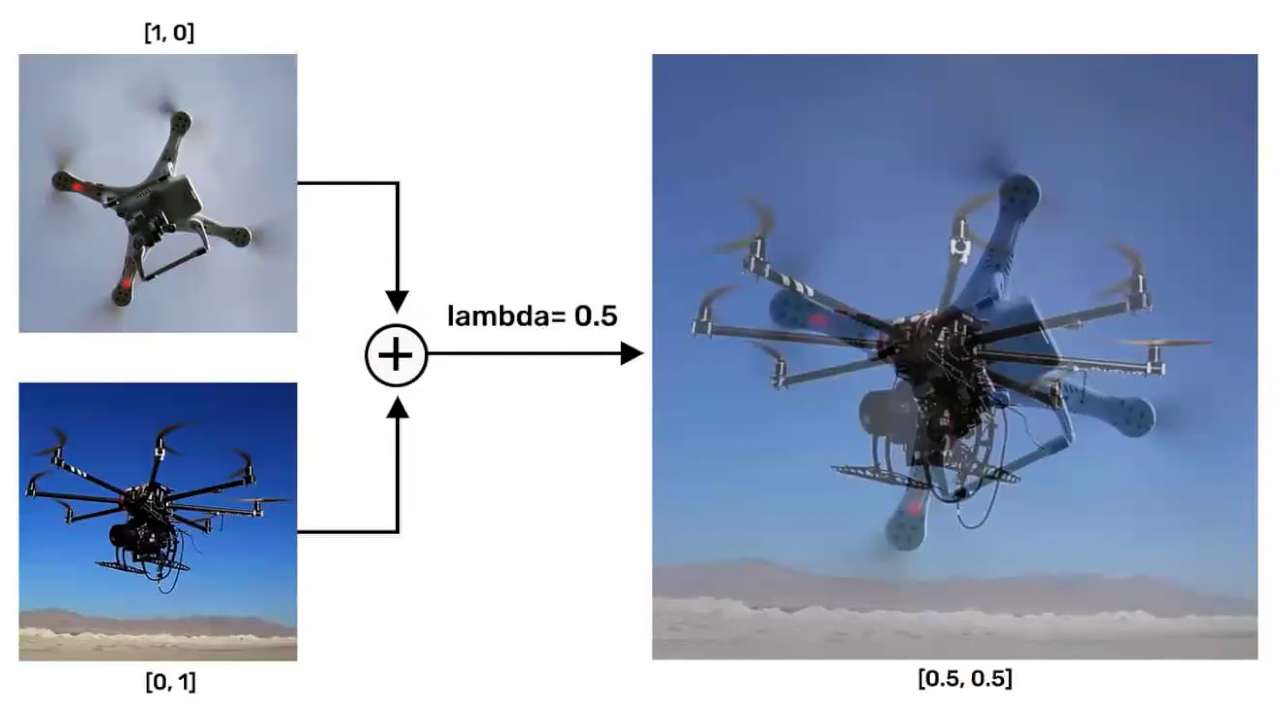
- occluded and overlapped objects
- improve model robustness
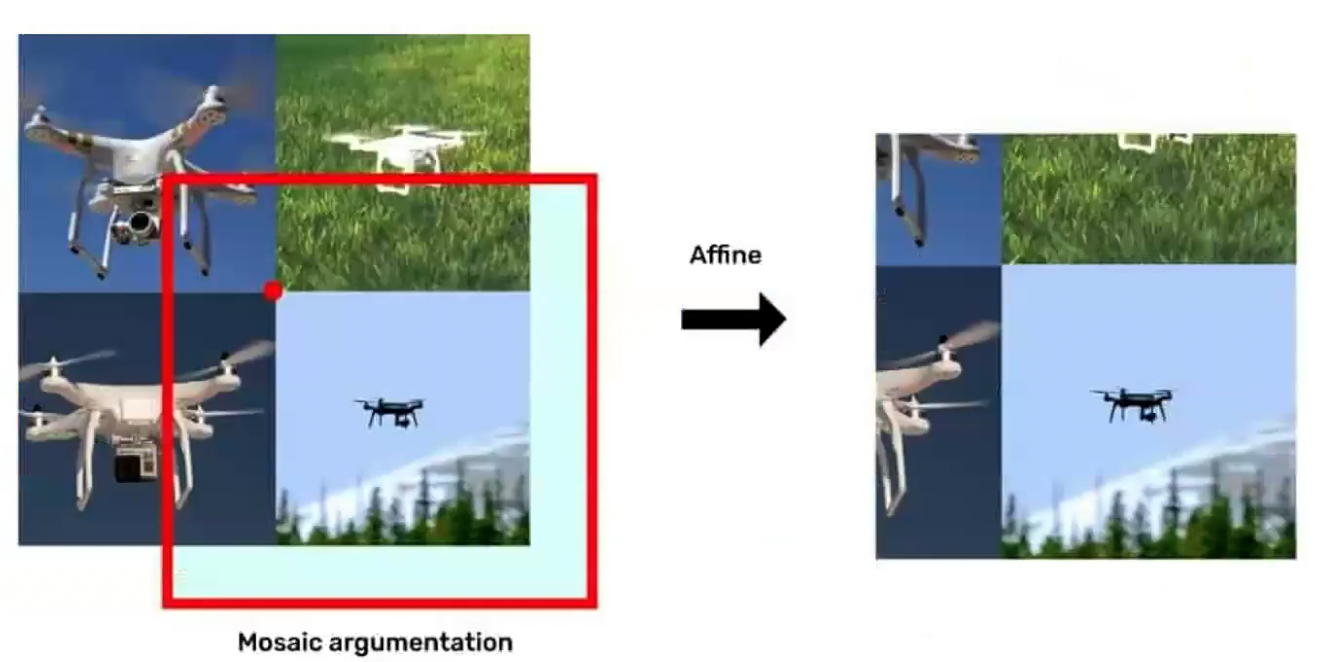
- four images are combined into one
- crops and resizes the images to create a new training sample
Yolo 26
- Realtime computer vision model
- Detection, Segmentation, Classification, Pose, Tracking, OBB (Oriented Bounding Box)
- Available in Nano, Small, Medium, Large, XLarge
- E2E detection pipeline (NMS-free, Non-Maximum Suppression free)
- Designed for edge AI and fast deployment
Why is it faster
- NMS-free infrerence removes post-processing overhead
- Direct bounding box regression (No DFL, Distribution Focal Loss)
- Lower latency and simpler deploymenet graph
- CPU-optimized architecture
- Up to 43% faster on CPUs than V11
Key Changes
- ProgLoss (Progressive Loss Balancing): improves training stability and convergence
- STAL (Small-Target-Aware Label Assignment): improves small-object detection
- MuSGD optimizer improves convergence speed
- Better speed-accuracy trade-off than many previous YOLO models
- Ideal for robotics, drones, surveillance, and edge devices
Inference pipeline
- Backbone: Efficient Hybrid CNN + Attention
- Neck: PAN-FPN (Multi-scale Feature Fusion)
- Head (Decoupled & Dual Head)
- One-to-Many Head: Dense supervision (Traning only, many positives)
- One-to-One Head: Single best match NMS-free inference (Inference & tranining)
Tranining pipeline
Instance Segmentation
- Identifies each pixel of an object instance
- whereas Semantic Segmentation classifies object pixels to specific classes/categories
- Instance Segmentation
- SegNet
- DeepMask
- SharpMask
- Mask RCNN
- Semantic Segmentation
- Conditional Random Field (CRF)
- Fully Convolutional Networks (FCN)
- U-Net
- Pyramid scene parsing network (PSPNet)
Application of Instance Segmentation
- Autonomous Driving
- Scene Understanding
- Aerial Image Processing
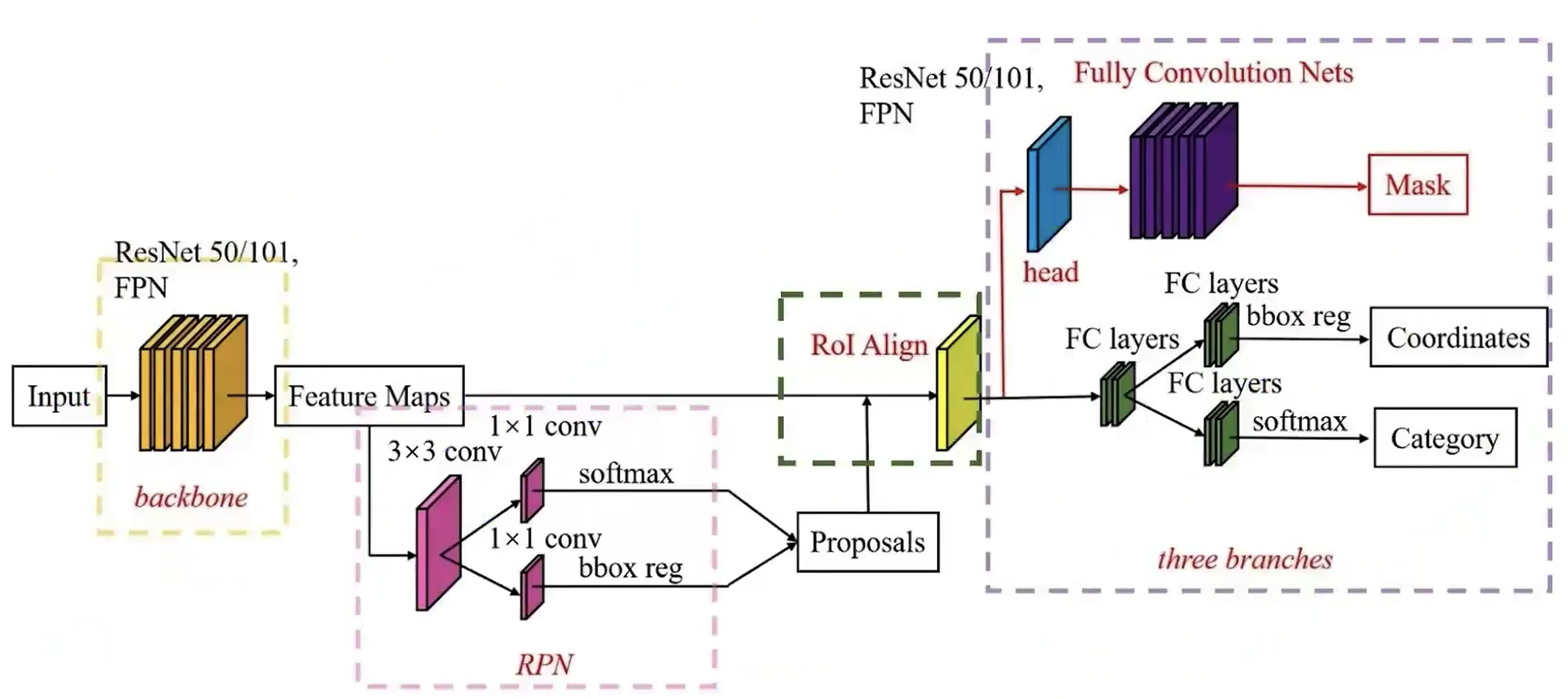
Mask R-CNN
Mask-Region Convolutional Neural Network
- An addition to the RCNN family, perfoming instance segmentation
- Improved over Faster RCNN
- Full Convolutional Network for predicting mask for each class/object.
- Two stages:
- RPN proposes candidiate object bounding boxes
- Classify the Candidates, refine bounding boxes, and predict mask.
Limitations of Mask R-CNN
- Computational Complexity: Traning and inference can be computationally intensive, requiring substantial resources (high resolution images or large datasets).
- Small-Object Segmentation: may struggle with accurately segment very small objects due to limited pixel information.
- Data Requirements: Training requires a large amount of annotated data, which can be time-consuming and expensive to acquire.
- Limited Generalization to Unseen Categories: The model's ability to generalize to unseen object categories is limited.
Semantic Segmentation
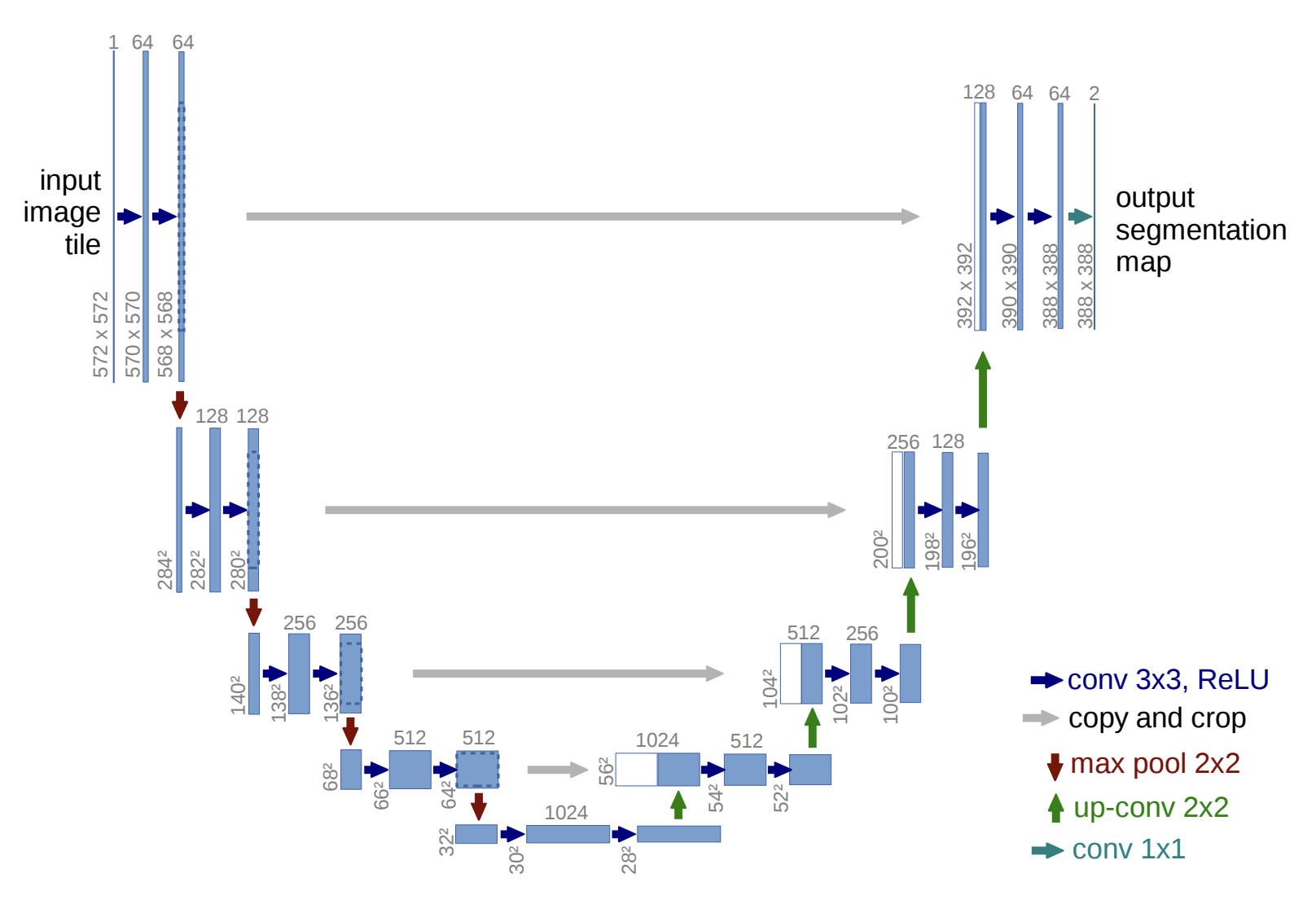
input image -> u-net -> output segmentation map
References
- Ge, Z., Liu, S., Wang, F., Li, Z., & Sun, J. (2021). YOLOX: Exceeding YOLO series in 2021. arXiv. https://doi.org/10.48550/arXiv.2107.08430
- Ronneberger, O., Fischer, P., & Brox, T. (2015). U-Net: Convolutional networks for biomedical image segmentation. In N. Navab, J. Hornegger, W. M. Wells, & A. F. Frangi (Eds.), Medical Image Computing and Computer-Assisted Intervention – MICCAI 2015 (Vol. 9351, pp. 234–241). Springer. https://doi.org/10.1007/978-3-319-24574-4_28