CNN 003
· 약 3분

Image Gradient
- It is a directional change in the intensity or color in an image.
- can be used to extract valuable information from images.
- commonly used in edge detection.
- ➡️ Change is X-directions, ⬇️ Change is Y-directions.
- Combining both X and Y diretion to estimate if changes are in both directions.
HoG, Histogram of Oriented Gradient
To find edge and shape of the object in the image
- Computing Image Gradient
- Use the horizontal and vertical filters to compute gradient values
- Compute the strength/magnitude and direction of gradient
- Strength/Magnitude(g):
- Direction():
- Create orientation histogram
- Divide the image into small connected regions called Cells which is a 8x8 patch
- Create cell histogram based on gradient direction and magnitude
- 64 (8x8) gradient vectors are put into a 9-bin histogram.
- The bins are the gradient directions () quantized into 9-bins
- Block Normalization
- 16x16 pixels blocks or 22 cells are used for normalization, which has 4 histograms.
- Normalization will make it scale/multiplication invariant
- Each block will represent 36x1 element vector
- Intensity: brightness of the pixel
- Saturation: HSV color space, the amount of gray in the color
- Calculate the HoG feature vector
- Each of the 36x1 vectors in each blocks are concatenated into one big vector
- Size of the vector will be 36xN, where N is the number of blocks in the image
- Hog feature extractor
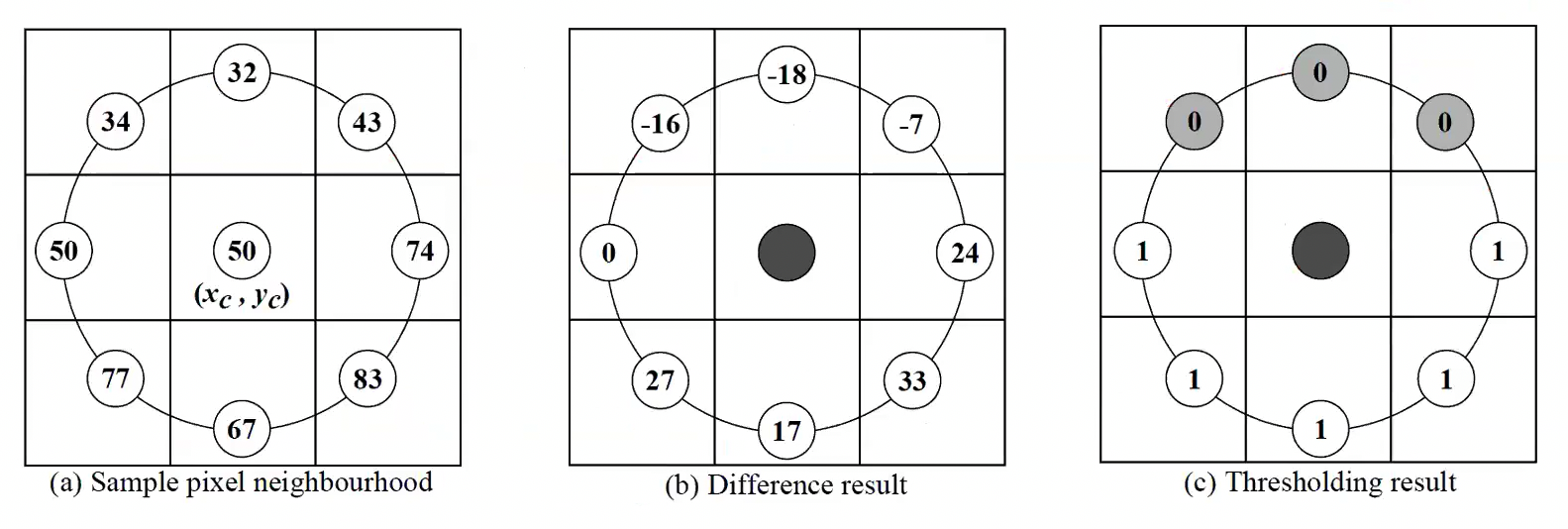
LBP, Local Binary Pattern
To describe the image textures
- An eifficient texture operator which labels each pixels of an image by thresholding their neighbours.
- A powerful feature for texture classification
- LBP operator is to describe the image textures using two measures namely, local spatial patterns and the gray scale constract of its strength.
- is a thresholding function
- is the center pixel in the 8 pixel neighbourhood
- is gray level of the center pixel
- is gray value of a smpling point in an equally spaced circular neighbourhood of P sampling points and radius R around the point
- Sample pixel neighbourhood
- Difference result
- Thresholding result
ANN