VLA Test Review
· 약 6분

VLATest: Testing and Evaluating Vision-Language-Action Models for Robotic Manipulation
- VLATest fuzzes 18,604 manipulation scenes (10 operators, 4 tasks) to systematically stress-test VLA robustness.
- Seven VLA models show low success and brittleness to confounders, lighting/camera changes, unseen objects, and instruction mutations; larger pretraining helps.
- Priorities: scale/augment demo data (incl. sim2real), use stepwise/CoT prompting & multi-agent setups, and expand benchmarks with online risk assessment.
Motivation & Gap
- Problem: Current VLA models are typically evaluated on small, hand-crafted scenes, leaving general performance and robustness in diverse scenarios underexplored.
- Goal: Introduce VLATest, a generation-based fuzzing framework that automatically creates robotic manipulation scenes to test performance and robustness of VLA models.
What Are VLA Models?
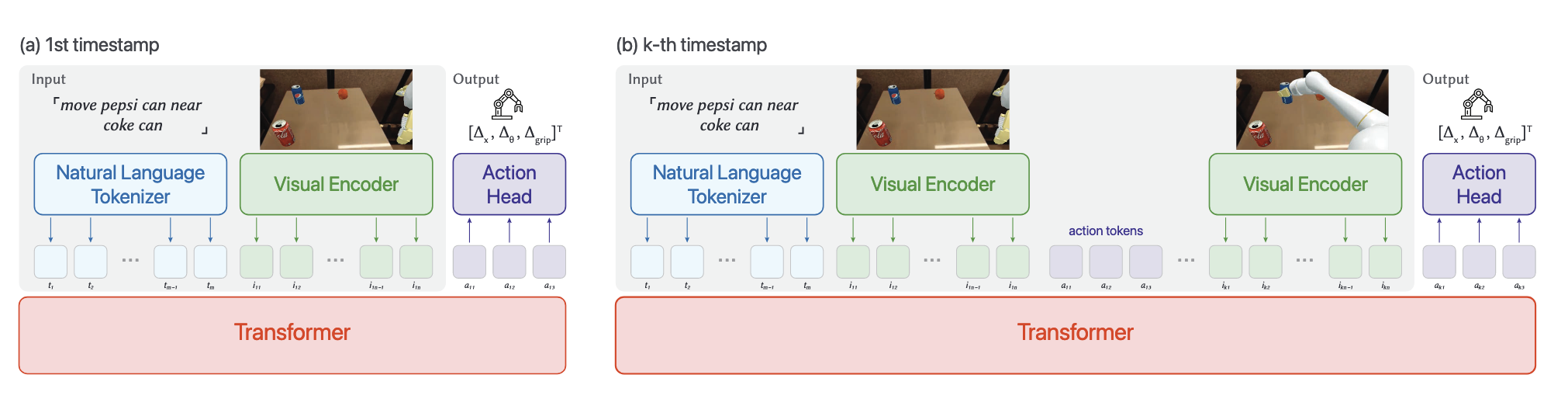
- Vision-Language-Action (VLA) models take natural language instructions + camera images and output low-level robot actions (Δx, Δθ, Δgrip).
- Inference loop: Tokenize text/image → transformer predicts action token A₁ → execute → append A₁ + new image tokens I₂ → predict A₂ → … until success or step limit.
Training & Evaluation
- Training: (1) Train from scratch on robot demonstrations, or (2) fine-tune a large VLM (e.g., Llava) with
>1B params pretraining. - Evaluation: Task-specific metrics (e.g., grasp, lift, hold for “pick up”), either in sim (auto-metrics) or real (manual labels).
VLATest Framework
- Ten testing operators grouped across:
- Target objects: type, position, orientation
- Confounding objects: type, position, orientation, count
- Lighting: intensity
- Camera: position, orientation
- Scene generation (Alg. 1): sample valid targets → (optional) confounders → mutate lighting (factor α) → mutate camera pose (d, θ). Semantic validity checks prevent infeasible scenes.

Research Questions (RQ)
- RQ1: Basic performance on popular manipulation tasks
- RQ2: Effect of confounding object count
- RQ3: Effect of lighting changes
- RQ4: Effect of camera pose changes
- RQ5: Robustness to unseen objects (OOD)
- RQ6: Robustness to instruction mutations
Tasks & Prompting
- Tasks:
- Pick up an object (grasp + lift ≥0.02 m for 5 frames)
- Move A near B (≤0.05 m)
- Put A on B (stable stacking)
- Put A into B (fully inside)
- Standard prompts (RQ1–RQ5):
pick up [obj]·move [objA] near [objB]·put [objA] on [objB]·put [objA] into [objB]
- Instruction mutations (RQ6): 10 paraphrases per task (GPT-4o), manually validated for semantic equivalence.
Experimental Setup
- Scenes: 18,604 across 4 tasks (ManiSkill2).
- Models: 7 public VLAs (RT-1-1k/58k/400k, RT-1-X, Octo-small/base, OpenVLA-7b).
- Compute:
>580 GPU hours.
Key Results & Findings
RQ1 — Overall Performance
- VLA models underperform overall; no single model dominates across tasks.
- Example best-case rates (default settings): 34.4% (Task1, RT-1-400k), 12.7% (Task2, OpenVLA-7b), 2.2% (Task3, RT-1-X), 2.1% (Task4, Octo-small).
- Stepwise breakdown (Task 1): grasp 23.3% → lift 15.7% → hold 12.4% ⇒ difficulty composing sequential actions.
- Implication (Finding 2): Consider stepwise prompting / chain-of-thought to decompose complex tasks.
RQ1 — Coverage Metric
- No established coverage for VLA; adopted trajectory coverage (pragmatic).
- Increasing cases from n=10 to n=1000 achieved 100% coverage across tasks (object-position novelty relative to workspace).
RQ2 — Confounding Objects
- More confounders ⇒ worse performance; models struggle to locate the correct object.
- Similarity doesn’t matter much: Mann–Whitney U shows no significant difference between similar vs dissimilar distractors (p = 0.443, 0.614, 0.657, 0.443; effect sizes ≈ 0.23–0.29).
RQ3 — Lighting Robustness
- Lighting perturbations significantly hurt performance.
- OpenVLA-7b most robust (77.9% of previously passed cases still pass), plausibly due to SigLIP + DINOv2 pretraining and LLaVA 1.5 mixture.
- Sensitivity: even α
<2.5 increase drops success to ~0.7×; α>8 ⇒ ~40% of default-pass scenes succeed. - Decreasing light hurts less than increasing; α
<0.2 still ~60% pass.
RQ4 — Camera Pose Robustness
- Small pose changes (≤5° rotation, ≤5 cm shift) reduce success to 34.0% of default.
- RT-1-400k most robust (45.6% retain), OpenVLA-7b at 31.3%; Octo models
<10%.- Likely due to training data scale differences.
RQ5 — Unseen Objects
- Using YCB (56 unseen objects) leads to large performance drops versus seen objects: avg –74.2%, –66.7%, –66.7%, –20.0% on Tasks 1–4.
- Transfer rate across steps:
- , with
- Paired t-tests show significant differences on for Task 1 & 2 (p = 0.011, 0.007; Cohen’s d = 1.34, 0.891).
- Primary failure mode: recognizing/locating unseen objects.
RQ6 — Instruction Mutations
- Mutated instructions generally reduce performance (avg drops: –32.8% T1, –1.7% T2, –8.3% T3; negligible on T4).
- Larger language backbones help: OpenVLA-7b (Llama 2-7B) is more robust, sometimes improving under mutations (e.g., T1, T4).
Implications & Directions
- Scale matters: larger pretraining and robot-demo datasets improve robustness (lighting/camera).
- Data enrichment: use data augmentation and sim-to-real to diversify external factors; leverage traditional controllers to auto-generate demonstrations.
- Prompting strategies: adopt stepwise/CoT prompting; consider multi-agent decompositions.
- Benchmarking: the 18,604 VLATest scenes serve as an early benchmark; expand to more tasks/robots/conditions.
- Online risk assessment: explore uncertainty estimation and safety monitoring for runtime quality control.
Related Work
- Robotics foundation models: (1) LLMs for planning/rewards; (2) Multi-modal FMs (VLMs/VLAs) for manipulation & perception.
- CPS testing: gray-box/black-box fuzzing and search-based testing exist, but not directly applicable to VLAs (multimodality, autoregression, scale).
- FM evaluation: beyond static benchmarks, VLATest dynamically generates 3D manipulation test cases—distinct from text-only testing.
Threats to Validity (mitigations in study)
- Internal: randomness (mitigated by 18,604 scenes); potential prompt bias (mutations manually validated).
- External: generalization to other tasks/models; chose popular tasks (Open X-Embodiment) and SOTA public models.
- Construct: limited operators (lighting/camera/confounders chosen; future: #lights, camera intrinsics, resolution).
- Coverage: trajectory coverage used as a pragmatic proxy.
Conclusion
- VLATest: early, generation-based fuzzing framework (10 operators) for VLA testing in ManiSkill2.
- Empirical evidence across 7 models / 4 tasks / 18,604 scenes shows limited robustness (lighting, camera, unseen objects, instruction variation).
- Points to data scaling, prompting, benchmarking, and risk assessment as practical paths to more reliable VLA systems.
Ref
- Wang, Z., Zhou, Z., Song, J., Huang, Y., Shu, Z., & Ma, L. (2025). VLATest: Testing and Evaluating Vision-Language-Action Models for Robotic Manipulation. Proceedings of the ACM on Software Engineering, 2(FSE), 1615–1638.