Open X-Embodiment review
· 약 5분

RT-X
- RT-X trains generalist robot policies by co-training RT-1/RT-2 on an X-embodiment mix of multi-robot, multi-task data, enabling efficient adaptation to new robots, tasks, and environments.
- It standardizes 1M+ trajectories from 22 embodiments into the Open X-Embodiment (RLDS/tfrecord) repository, unifying observations and 7-DoF actions via coarse alignment.
- Experiments show strong positive transfer and emergent skills (≈3× with RT-2-X on cross-robot tasks); performance scales with model capacity, short image histories, and web pretraining, while sensing/actuation diversity and frame alignment remain open problems.
Motivation
- Seeks a generalist X-robot policy that can be efficiently adapted to new robots, tasks, and environments.
- Mirrors a trend from CV/NLP where general-purpose, web-scale pretrained models outperform narrow, task-specific models.
- Robotics lacks comparably large, diverse interaction datasets, making direct transfer of these lessons challenging.
Objectives
- Positive transfer: Test whether co-training on data from many robots improves performance on each training domain.
- Ecosystem building: Organize large robotic datasets to enable future X-embodiment research.
Core Approach
- Train RT-1 and RT-2 on data from 9 different manipulators, producing RT-X variants that outperform policies trained only on the evaluation domain and show better generalization and new capabilities.
What’s Different From Prior Transfer Methods
- Many prior works reduce the embodiment gap via specialized mechanisms (shared action spaces, representation learning objectives, policy adaptation using embodiment metadata, decoupled robot/environment representations, domain translation).
- RT-X directly trains on X-embodiment data without explicit gap-reduction machinery and still observes positive transfer.
Dataset & Format (Open X-Embodiment)
- 1M+ real robot trajectories, 22 embodiments (single-arm, bimanual, quadrupeds), pooled from 60 datasets / 34 labs, standardized for easy use.
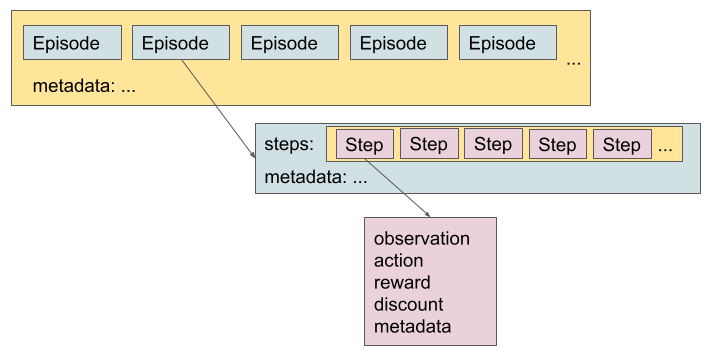
- Uses RLDS (serialized
tfrecord), supporting varied action spaces and input modalities (RGB, depth, point clouds), and efficient parallel loading across major DL frameworks. - Language annotations are leveraged; PaLM is used to extract objects/behaviors from instructions.
Data Format Consolidation (Coarse Alignment)
- Observations: History of recent images + language instruction. One canonical camera view per dataset is resized to a common resolution.
- Actions: Convert original controls to a 7-DoF end-effector vector (x, y, z, roll, pitch, yaw, gripper or their rates). Actions are normalized before discretization; outputs are de-normalized per embodiment.
- Deliberate non-alignment: Camera poses/properties are not standardized; action frame alignment across datasets is not enforced. The same action vector may cause different motions on different robots (absolute/relative, position/velocity allowed).
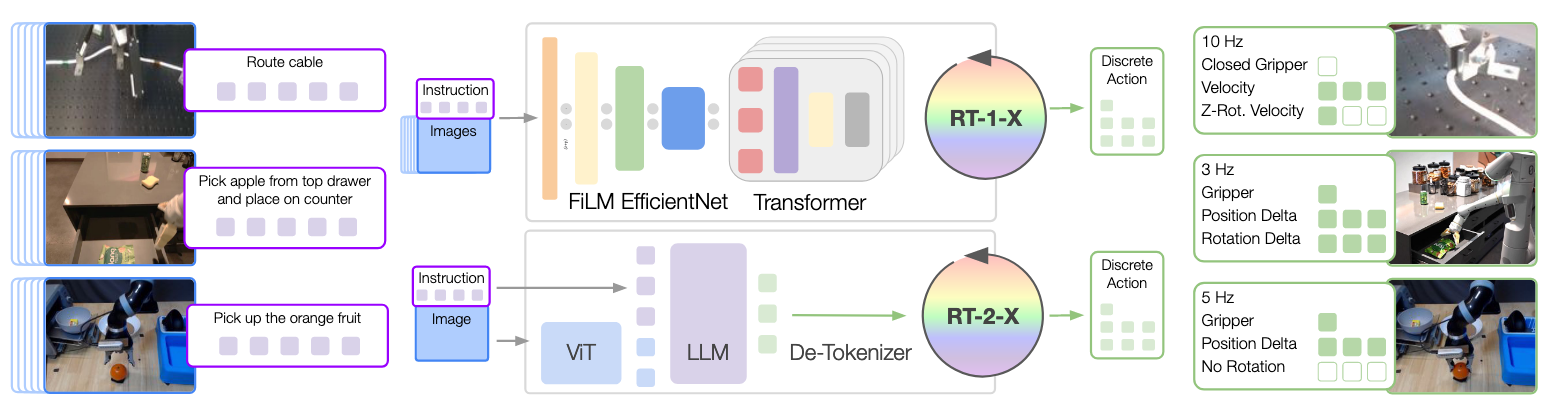
Policy Architectures
- RT-1 (≈35M params): Transformer for control. Inputs: 15-frame image history + natural-language instruction.
- Vision via ImageNet-pretrained EfficientNet; language via USE embedding.
- Fuse via FiLM → 81 vision–language tokens → decoder-only Transformer outputs tokenized actions.
- RT-2 (VLA family): Internet-scale VLM co-fine-tuned to output action as text tokens (e.g.,
1 128 91 241 5 101 127).- Any pretrained VLM can be adapted; this work uses RT-2–PaLI-X (ViT backbone + UL2 LM; primarily pretrained on WebLI).
Training Setup
- Robotics data mixture: Data from 9 manipulators (a union of multiple well-known robotics datasets).
- Loss: Standard categorical cross-entropy over tokenized actions.
- Regimes:
- RT-1-X: Trained solely on the robotics mixture.
- RT-2-X: Co-fine-tuned on a ~1:1 mix of original VLM data and the robotics mixture.
Experimental Questions
- Does X-embodiment co-training improve in-domain performance (positive transfer)?
- Does it improve generalization to unseen tasks?
- How do model size, architecture, and dataset composition influence performance/generalization?
Key Results
- Small-scale domains: RT-1-X outperforms the Original Method (the authors’ per-dataset baselines) on 4/5 datasets with a large average gain → limited data domains benefit greatly from X-embodiment co-training.
- Large-scale domains:
- RT-1-X does not beat an RT-1 trained only on the embodiment-specific large dataset (suggests underfitting for this class).
- RT-2-X (larger capacity) outperforms both Original Method and RT-1 → X-robot training helps even in data-rich regimes when using sufficient capacity.
Generalization & Emergent Skills
- Unseen objects/backgrounds/environments: RT-2 and RT-2-X perform on par (VLM backbone already strong here).
- Emergent skills (transfer across robots): On Google Robot tasks that do not appear in RT-2’s dataset but exist in Bridge (for WidowX), RT-2-X ≈ 3× RT-2.
- Removing Bridge from RT-2-X training significantly reduces hold-out performance → skills likely transferred from WidowX data.
Design Insights (Ablations)
- Short image history notably improves generalization.
- Web pretraining is critical for large models’ high performance.
- Model capacity matters: 55B model succeeds more than 5B on emergent skills → greater capacity ⇒ greater cross-dataset transfer.
- Co-fine-tuning vs. fine-tuning: Similar performance in this study (attributed to the greater diversity of robotics data in RT-2-X vs. prior works).
Limitations (Open Problems)
- Does not cover robots with very different sensing/actuation modalities.
- Does not study generalization to new robots nor define a decision criterion for when positive transfer will occur.
- Camera pose/properties and control frame remain unaligned; a deliberate but still challenging domain gap to address in future work.
Ref
- O’Neill, A., Rehman, A., Maddukuri, A., Gupta, A., Padalkar, A., Lee, A., Pooley, A., Gupta, A., Mandlekar, A., & Jain, A. (2024). Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. 2024 IEEE International Conference on Robotics and Automation (ICRA).